NJU计算机课程基础实验 (完) 2022-09-16
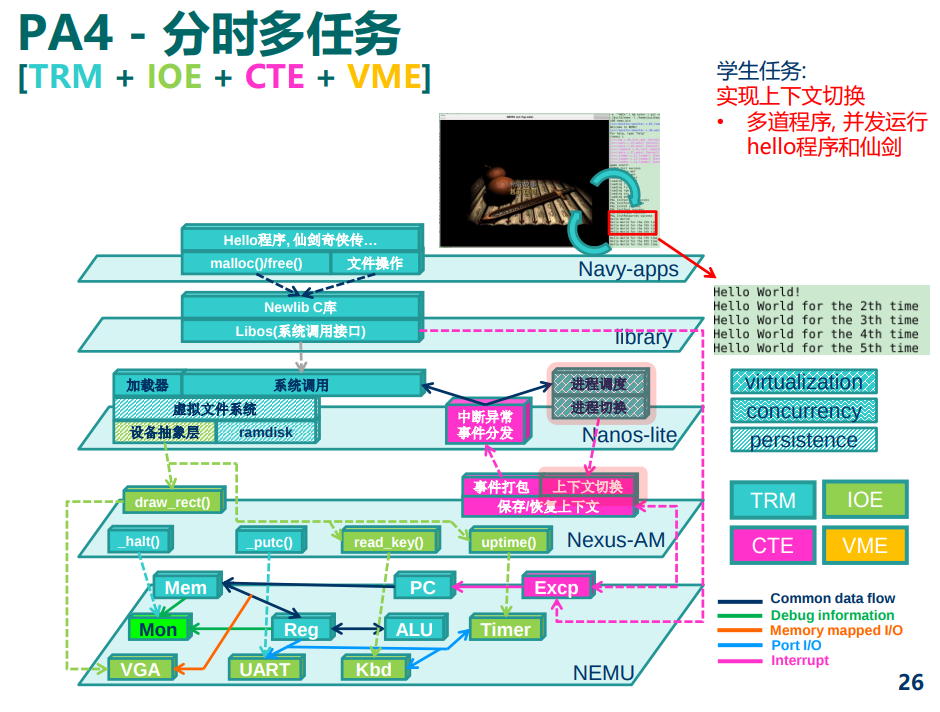
虚实交错的魔法: 分时多任务
从这我越来越感受到系统复杂度上升带来的挑战,也明白了抽象的根本目的。
抽象是为了降低复杂度,为了系统能够更好的做大以及稳健和排错。
而且抽象能让你切换不同的“后续程序”进行测试,甚至在大概率正确的载体上进行diff查看到底是哪一层出现了问题(参考各种native)
如何相信抽象是对的?——对每一个抽象层完成后的充分测试。
善用assert是魔法!
(个人能力受限,挂在了2阶的最后pal阶段。。。其实基本也算是做完了.也许有机会能请教大佬解决一下,这样就可以做第三阶段了,很可惜,但也只能这样了。)
2022年9月16日记
上下文切换
自从有了上下文切换后,程序也就有了进程的概念。(从静止到运动的飞跃 ~~·)
假设进程A运行的过程中触发了系统调用, 陷入到内核. 根据
__am_asm_trap()的代码, A的上下文结构(Context)将会被保存到A的栈上. 在PA3中, 系统调用处理完毕之后,__am_asm_trap()会根据栈上保存的上下文结构来恢复A的上下文.
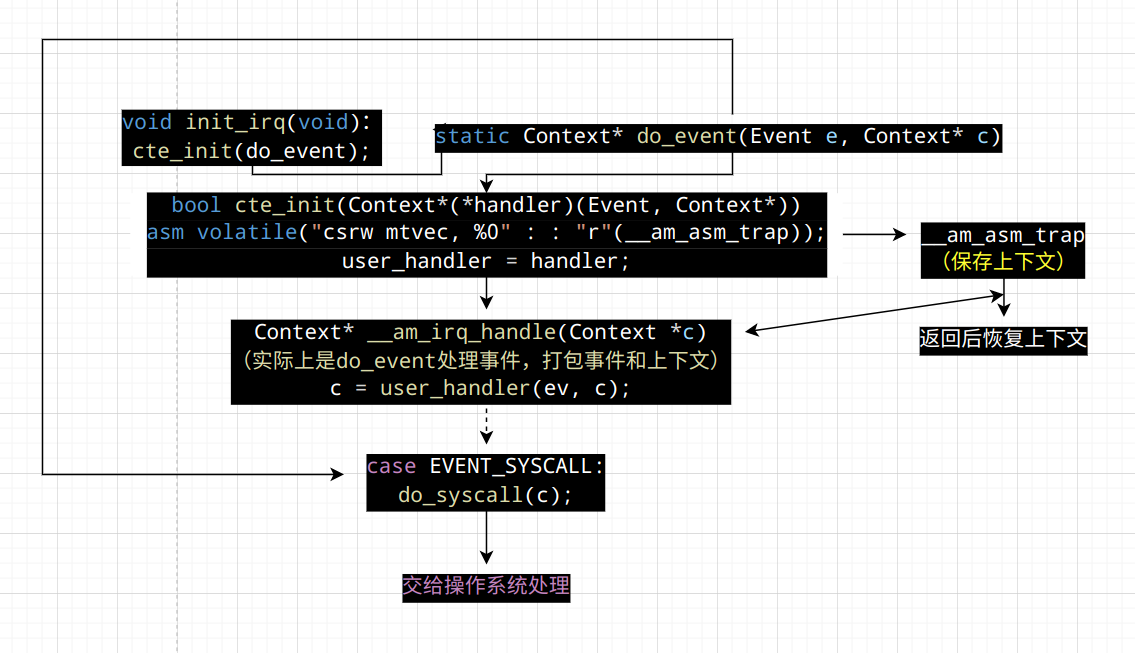
如果我们先不着急恢复A的上下文, 而是先将栈顶指针切换到另一个进程B的栈上, 那会发生什么呢? 由于B的栈上存放了之前B保存的上下文结构, 接下来的操作就会根据这一结构来恢复B的上下文. 上下文切换其实就是不同进程之间的栈切换!
进程控制块
有不少信息都是进程相关的, 除了刚才提到的上下文指针
cp之外, 上文提到的栈空间也是如此. 为了方便对这些进�程相关的信息进行管理, 操作系统使用一种叫进程控制块(PCB, process control block)的数据结构, 为每一个进程维护一个PCB. Nanos-lite使用一个联合体来把其它信息放置在进程堆栈的底部. 代码为每一个进程分配了一个32KB的堆栈, 已经足够使用了, 不会出现栈溢出导致UB. 在进行上下文切换的时候, 只需要把PCB中的cp指针返回给CTE的__am_irq_handle()函数即可, 剩余部分的代码会根据上下文结构恢复上下文.
内核线程
对于刚刚加载完的进程, 我们要怎么切换到它来让它运行起来呢?? 答案很简单, 我们只需要在进程的栈上人工创建一个上下文结构, 使得将来切换的时候可以根据这个结构来正确地恢复上下文即可. 我们先把Nanos-lite中直接定义的一些测试函数作为程序. Nanos-lite提供了一个测试函数
hello_fun()(在nanos-lite/src/proc.c中定义), 我们接下来的任务就是为它创建一个上下文, 然后切换到它来执行. 这样的执行流有一个专门的名称, 叫"内核线程"(kernel thread).创建内核线程的上下文是通过CTE提供的
kcontext()函数 (在abstract-machine/am/src/$ISA/nemu/cte.c中定义)来实现的, 在Nanos-lite中, 我们可以通过一个context_kload()函数来进行进一步的封装: 它会调用kcontext()来创建上下文, 并把返回的指针记录到PCB的cp中上下文的创建和切换是CTE的工作, 而具体切换到哪个上下文, 则是由操作系统来决定的, 这项任务叫做进程调度 进程调度是由
schedule()函数(在nanos-lite/src/proc.c中定义)来完成的, 它用于返回将要调度的进程上下文. 因此, 我们需要一种方式来记录当前正在运行哪一个进程, 这样我们才能在schedule()中返回另一个进程的上下文我们让
schedule()总是切换到pcb[0]. 注意它的上下文是通过kcontext()创建的, 在schedule()中才决定要切换到它, 然后在CTE的__am_asm_trap()中才真正地恢复这一上下文.
努力理解了一下,然后写了个汇编,成功点亮~(主要卡在kcontex如何传送area)
这里还要思考一下area到底怎么才是对的。开头地址kstack.start应该拿谁?那段空间应该从哪边开始界定(这也是需要理解的坑)
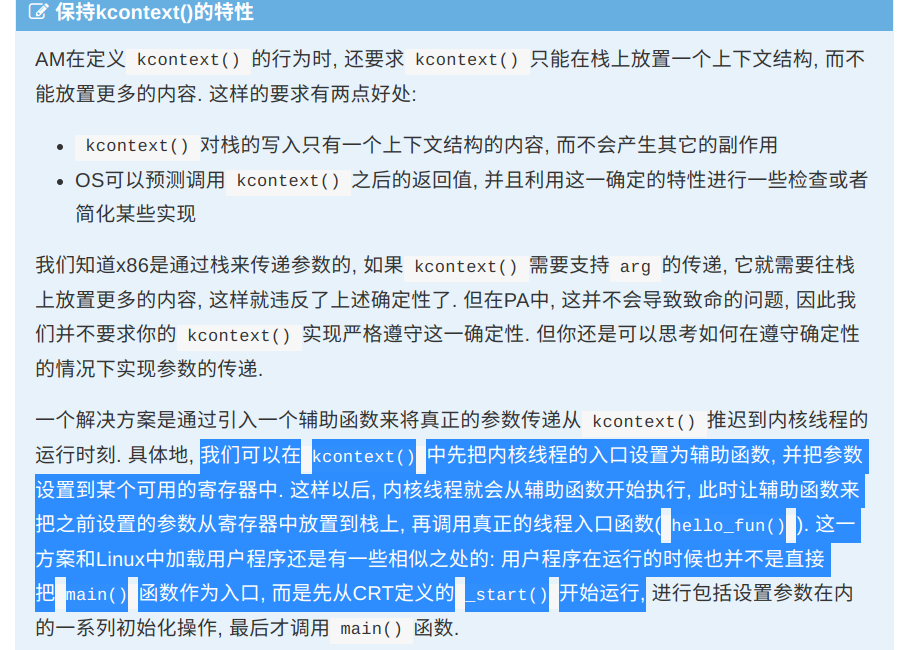
内核线程的参数
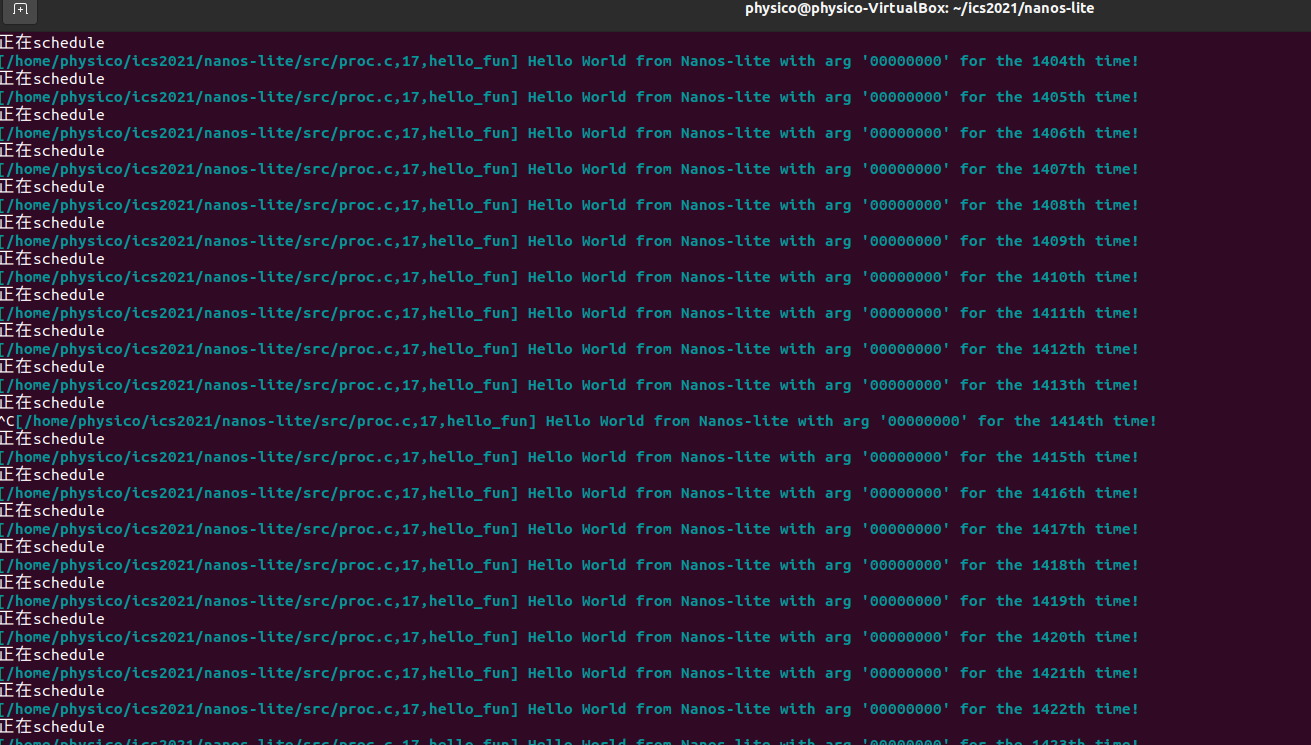
我们来创建两个内核线程, 给它们传递不同的参数, 然后在输出的信息中把参数也一同输出, 这样我们就能看到执行流在两个内核线程之间来回切换了! 我们只需要让
kcontext()按照调用约定将arg放置在正确的位置, 将来hello_fun()执行的时候就可以获取正确的参数了.
感叹这个设计真聪明~
实现上下文切换(2)
根据讲义的上述内容, 实现以下功能:
修改CTE的
kcontext()函数, 使其支持参数arg的传递通过
kcontext()创建第二个以hello_fun()为入口的内核线程, 并传递不同的参数修改Nanos-lite的
schedule()函数, 使其轮流返回两个上下文你可以自行约定用何种类型来解析参数
arg(整数, 字符, 字符串, 指针等皆可), 然后修改hello_fun()中的输出代码, 来按照你约定的方式解析arg. 如果你的实现正确, 你将会看到hello_fun()会轮流输出不同参数的信息.
这里要想想,riscv用什么方法传参呢?然后思考一下会不会和我们之前的操作有没有冲突(本质是执行顺序的问题,实际上没任何问题)
为什么这里叫做内核线程?我的想法是因为他在nanos内部调用实现,并且可以达到快速的执行流切换的效果。
在真实的操作系统中, 内核中的很多后台任务, 守护服务和驱动程序都是以内核线程的形式存在的. 如果你执行
ps aux, 你就会看到系统中有很多COMMAND中带有中括号的内核线程(例如[kthreadd]). 而创建和执行它们的原理, 也是和上面的实验内容非常相似(当然具体实现肯定会有所不同).
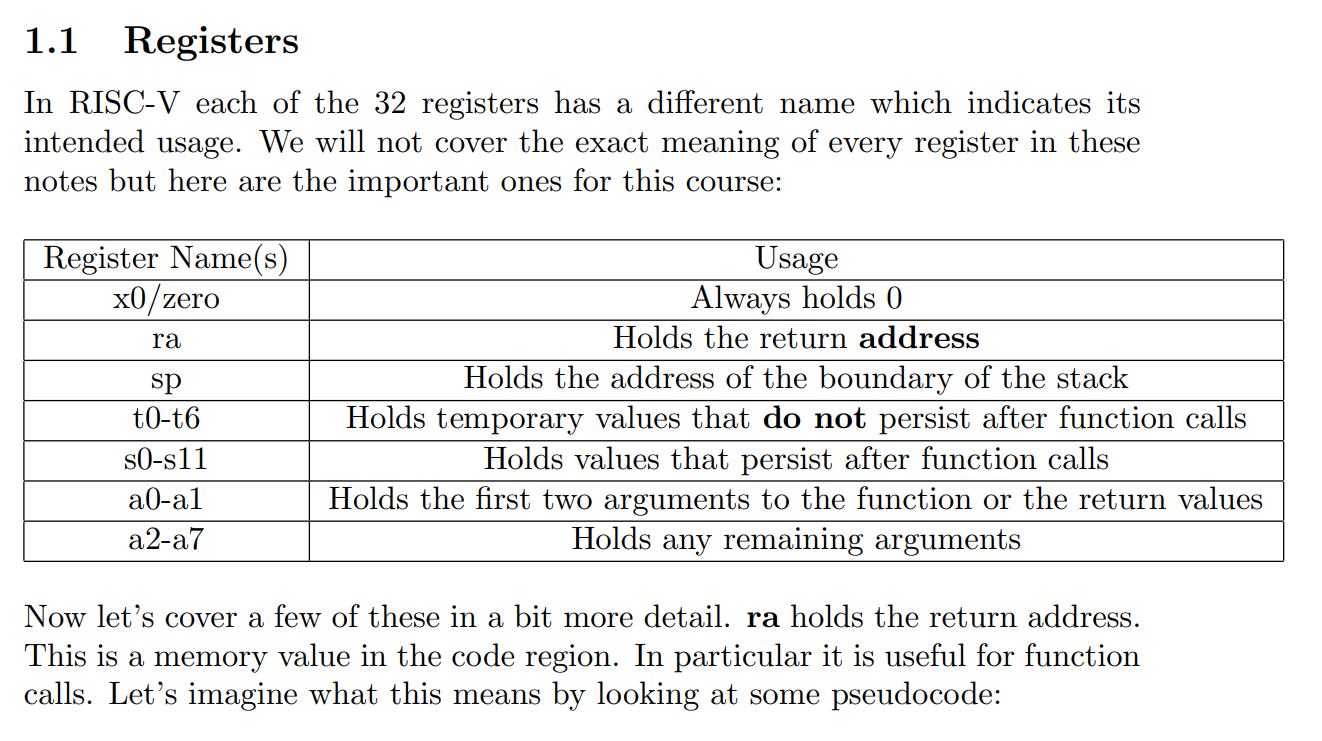
有关一些调用约定:
用户进程
创建用户进程上下文
在PA3的批处理系统中, 我们在
naive_uload()中直接通过函数调用转移到用户进程的代码, 那时候使用的还是内核区的栈
怎么知道的?因为naive_uload跳转的entry本质是在nanos的时候调用函数,出入栈都在内部完成。
如果内核线程发生了栈溢出, 怎么办?
如果能检测出来, 最好的方法就是触发kernel panic, 因为这时候内核的数据已经不再可信, 如果将一个被破坏的数据写回磁盘, 将会造成无法恢复的毁灭性损坏.
好消息是, 内核线程的正确性可以由内核开发人员来保证, 这至少要比保证那些来路不明的用户进程的正确性要简单多了. 而坏消息则是, 大部分的内核bug都是第三方驱动程序导致的: 栈溢出算是少见的了, 更多的是use-after-free, double-free, 还有难以捉摸的并发bug. 而面对海量的第三方驱动程序, 内核开发人员也难以逐一保证其正确性. 如果你想到一个可以提升驱动程序代码质量的方法, 那就是为计算机系统领域作出贡献了.
Nanos-lite和Navy作了一项约定: Nanos-lite把栈顶位置设置到GPRx中, 然后由Navy里面的
_start来把栈顶位置真正设置到栈指针寄存器中.
这里我实现后一直出不来。。(首先记得不能在init加载程序了)
最后发现原来是局部变量和全局的问题(我把参数设置在init,init结束后在stack上的参数自动没了。。。所以就找不到了),最好的方法是直接传入或者是全局变量
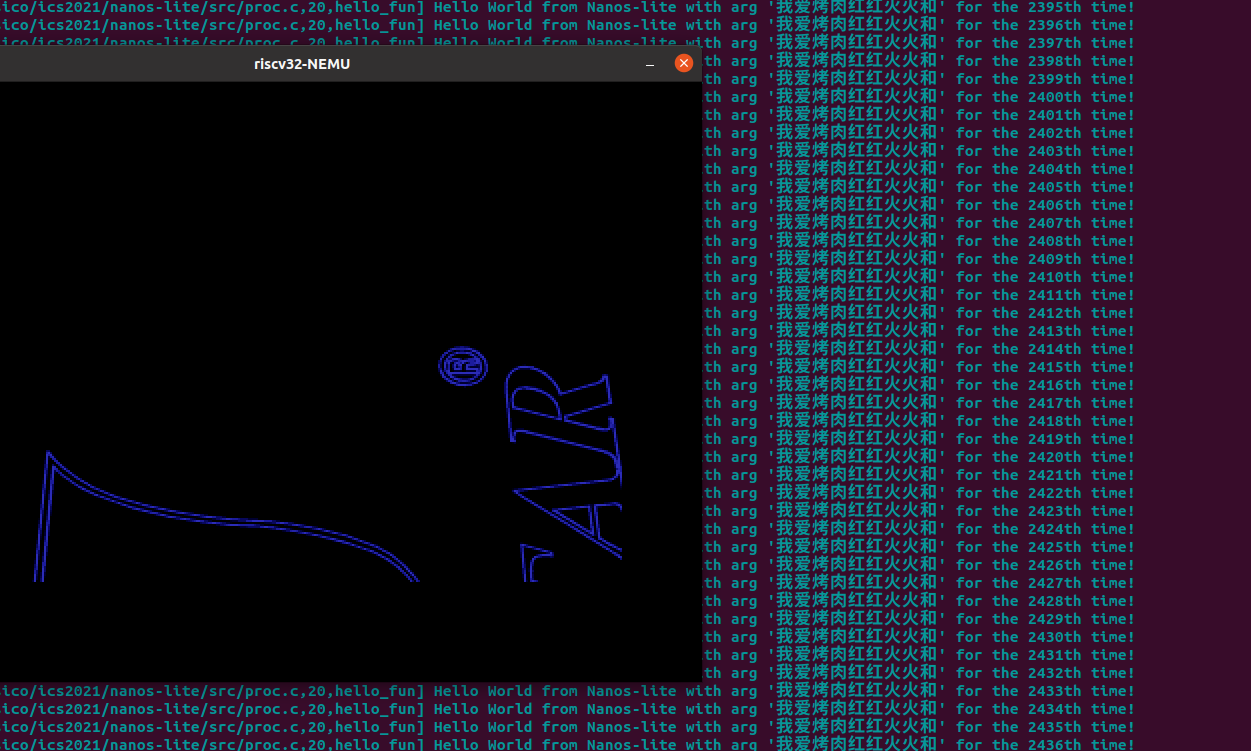
此时有点“一起卡”的感觉,本质是因为pal 的屏幕io的时候就切换去跑hello了。(yield)
问:如何验证仙剑奇侠传确实在使用用户栈而不是内核栈?
只要获取pal内部的地址信息在什么范围即可。
还好检查了一下这个,一看发现我的pal还是在内核,直接翻车- -
后面思考了一下发现应该是stack分配的问题。。这点上讲义确实不骗人 老老实实实现就行了。
认真注意这句话:“目前我们让Nanos-lite把heap.end作为用户进程的栈顶, 然后把这个栈顶赋给用户进程的栈指针寄存器就可以了.”
用户进程的参数
最适合存放参数和环境变量的地方就是用户栈了, 因为在首次切换到用户进程的时候, 用户栈上的内容就已经可以被用户进程访问. 于是操作系统在加载用户进程的时候, 还需要负责把
argc/argv/envp以及相应的字符串放在用户栈中, 把它们的存放方式和位置作为和用户进�程的约定之一, 这样用户进程在_start中就可以根据约定访问它们了.https://github.com/riscv-non-isa/riscv-elf-psabi-doc ABI手册有一节Process Initialization的内容, **里面详细约定了操作系统需要为用户进程的初始化提供哪些信息. **不过在我们的Project-N系统里面, 我们只需要一个简化版的Process Initialization就够了: 操作系统将
argc/argv/envp及其相关内容放置到用户栈上, 然后将GPRx设置为argc所在的地址.
这里遇到了一个问题,数组一旦作为参数传入后就退化成了指针,我们怎么才能求得正确的大小呢?一个机智的方式是在末尾留个NULL(很多东西都参考了这个设计),这样就可以随意遍历求得数组大小了。
每次操作差点忘记操作栈顶导致翻车,一顿操作猛如虎安排好了用户栈的空间状况,成功跳过开头。(pal的代码写的确实比较通俗)
实现带参数的SYS_execve
用户进程的参数还是应该由用户来指定的.最好能有一个方法能把用户指定的参数告诉操作系统,
让操作系统来把指定的参数放到新进程的用户栈里面.
为了实现带参数的
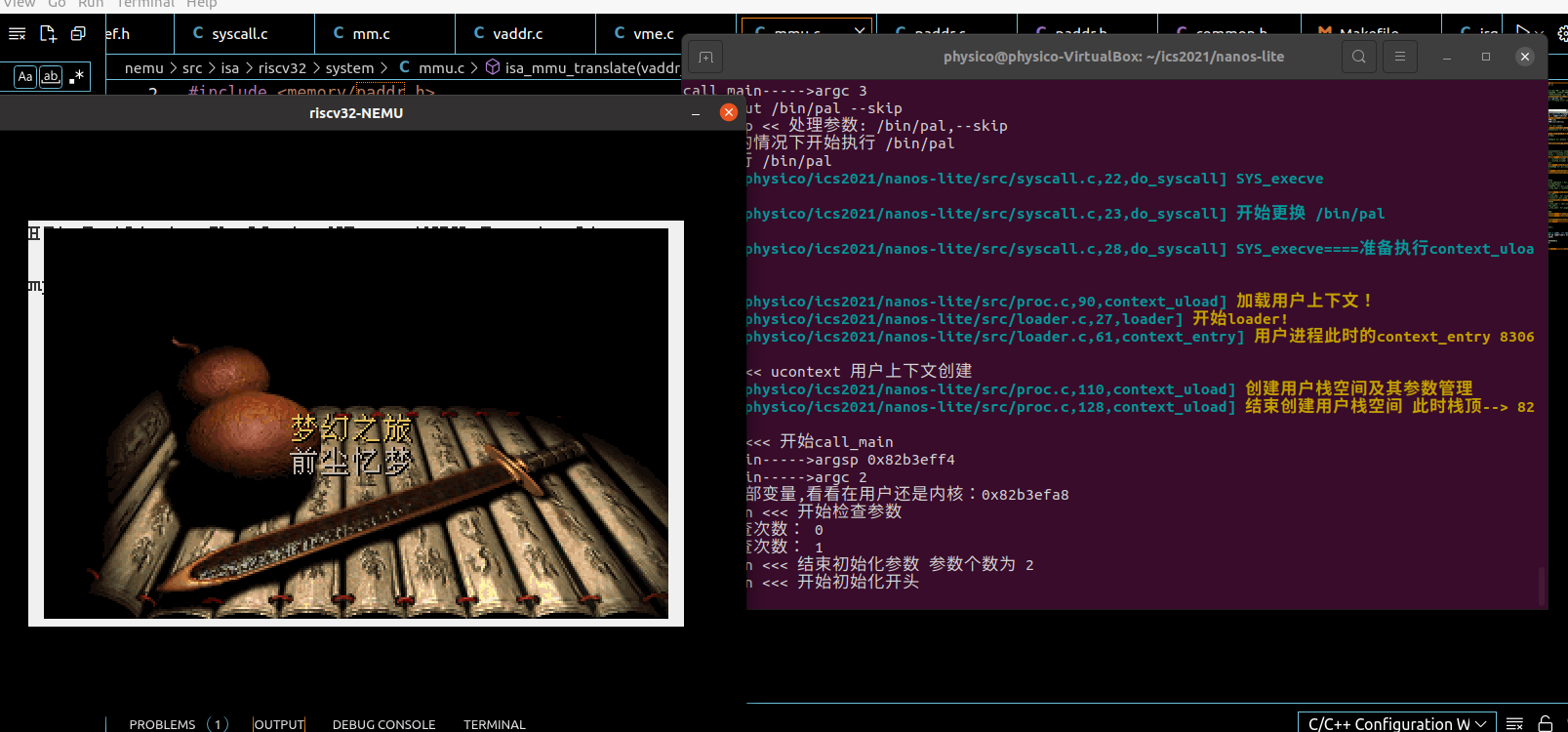
SYS_execve, 我们可以在sys_execve()中直接调用context_uload(). 但我们还需要考虑如下的一些细节, 为了方便描述, 我们假设用户进程A将要通过SYS_execve来执行另一个新程序B.
如何在A的执行流中创建用户进程B?
如何结束A的执行流?
我们可以从栈底(
heap.end)到栈顶(栈指针sp当前的位置)列出用户栈中的内容:
Nanos-lite之前为A传递的用户进程参数(
argc/argv/envp)A从
_start开始进行函数调用的栈帧, 这个栈帧会一直生长, 直到调用了libos中的execve()CTE保存的上下文结构, 这是由于A在
execve()中执行了系统调用自陷指令导致的Nanos-lite从
__am_irq_handle()开始进行函数调用的栈帧, 这个栈帧会一直生长, 直到调用了SYS_execve的系统调用处理函数通过上述分析, 我们得出一个重要的结论: 在加载B时, Nanos-lite使用的是A的用户栈! 这意味着在A的执行流结束之前, A的用户栈是不能被破坏的. 因此
heap.end附近的用户栈是不能被B复用的, 我们应该申请一段新的内存作为B的用户栈可以让
context_uload()统一通过调用new_page()函数来获得用户栈的内存空间.new_page()函数在nanos-lite/src/mm.c中定义, 它会通过一个pf指针来管理堆区, 用于分配一段大小为nr_page * 4KB的连续内存区域, 并返回这段区域的首地址. 我们让context_uload()通过new_page()来分配32KB的内存作为用户栈, 这对PA中的用户程序来说已经足够使用了.操作系统作为一个特殊的AM应用, 很多时候对动态内存申请却有更严格的要求, 例如申请一段起始地址是4KB整数倍的内存区域,
malloc()通常不能满足这样的要求. 因此操作系统一般都会自己来管理堆区, 而不会调用klib中的malloc(). 在操作系统中管理堆��区是MM(Memory Manager)模块的工作
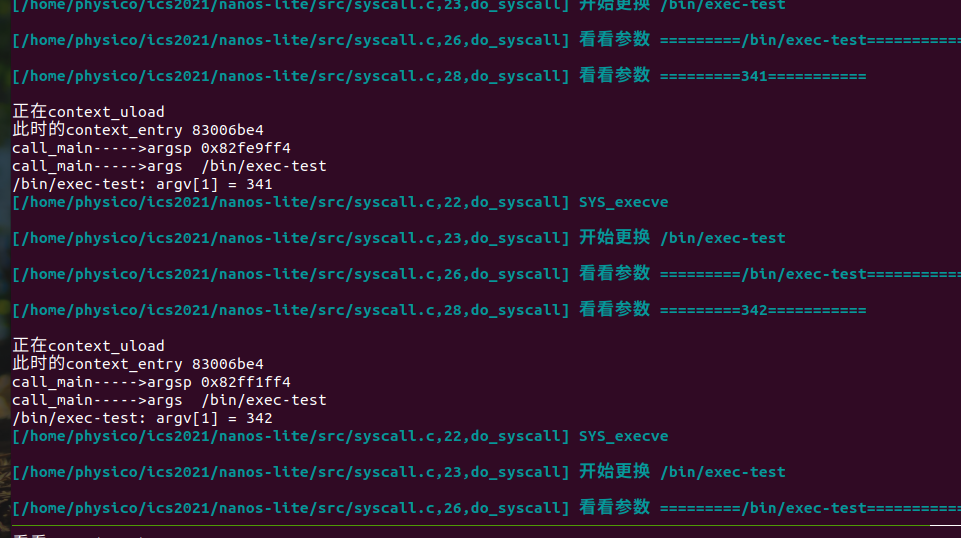
一开始理解错了什么是A还以为hello是A。。。。。然后被提醒后看了好几遍发现原来是这个意思= = (联系一下PA的上文,搞清楚到底是什么进程,这个进程在当下是什么,要换成什么进程)
一顿操作猛如虎成功:
这里运行nterm又挂了(其他都可以)我哭了- - 又开始排查问题,发现传入argc就会挂。。。具体原因不明,又要继续排查。最后发现是argv飞掉的问题(没有参数的时候如果传入指针拦不住)
总结:你必须搞清楚上下文是怎么从创建到调度的全过程,这样才能理解关键的每一个细节。
运行Busybox
我的不知道为啥遇到了致命的ld错误。。。。没办法跑
只能放弃了(很神奇的ld符号缺失)
虽然我后面暴力调整了源码可以编译通过了- -但是只能cat之类的基础功能。。。
然后不知道为什么让虚拟机走了几次快照,就可以用了- -只能说计算机真神奇呀。。。
WC也完美运行~
—skip也同理完结~ 这阶段最主要的就是麻烦。。很多时候可能一不小心argv就会爆炸。
第一阶段结束,这一阶段的关键就是1:上下文执行流是怎么保存和切换的 2:有关参数的指针小练习
以下几个问题:
- 终端如何读取用户的按键?
各种等待键盘事件。。。
- Shell如何进行命令的解析?
可以类似eval,然后要注意argv的维护
- 库函数如何根据命令解析出的字符串搜索到可执行文件?
execvp,维护了一个PATH
- 操作系统如何加载执行一个可执行文件?
维护参数表进入一个_start,处理后才进行真正的main(上下文切换和跳转)
程序和内存位置(很感人的阅读环节)
绝对代码
一般来说, 程序的内存位置是在链接时刻(link time)确定的(Navy-apps中的程序就是这样), 以前的程序员甚至在程序中使用绝对地址来进行内存访问, 这两种代码称为绝对代码(absolute code).
绝对代码会假设程序中的对象(函数和数据)位于某个固定的位置, 绝对代码只能在固定的内存位置才能正确运行.
操作系统在加载时刻分配的空闲内存位置, 并不总是能让这种程序正确运行.
因此, 这个问题的一个解决方案, 就是让操作系统记录程序的加载位置, 当一个程序试图加载到一个已经被使用的内存位置时, 加载将会失败, 操作系统将返回�一个错误. 为了避免加载失败, 一个方法是为每个程序维护多个不同加载地址的版本, 期望其中有一个版本可以被成功加载.
可重定位代码
为什么一定要提前确定一个程序的加载位置呢? 如果我们把链接时的重定位阶段往后推迟, 不就可以打破绝对代码的限制了吗?
于是有程序员开发了一类"自重定位(self-relocation)"的特殊程序, 这种程序可以**在开始运行的时候, 先把自己重定位到其它内存位置, **然后再开始真正的运行. 这种重定位类型称为"运行时(run time)重定位".
但对多任务操作系统来说, 这并没有真正解决问题, 因为程序在运行时刻并不知道重定位的目标内存位置是否空闲.
既然只有操作系统才知道内存是否空闲, 那就干脆让加载器来进行重定位吧, 于是有了"加载时(load time)重定位"的说法.
具体地, 加载器会申请一个空闲的内存位置, 然后将程序加载到这个内存位置, 并把程序重定位到这个内存位置, 之后才会执行这个程序. 今天的GNU/Linux就是通过这种方式来插入内核模块的.
位置无关代码 PIC
有没有方法可以节省重定位的开销, 甚至不进行重定位呢? 但链接时的重定位又可能会产生绝对代码, 这并不是我们所希望的 . 如果程序中的所有寻址, 都是针对程序位置来进行相对寻址操作, 这样的程序就可以被加载到任意位置执行, 而不会出现绝对代码的问题
这就是PIC(position-independent code, 位置无关代码)的基本思想. 今天的动态库都是PIC, 这样它们就可以被加载到任意的内存位置了. 此外, 如果一个可执行文件全部由PIC组成, 那么它有一个新名字, 叫PIE(position-independent executable, 位置无关可执行文件). 编译器可以通过特定的选项编译出PIE.
PIE之所以能做到位置无关, 其实是要依赖于程序中一个叫GOT(global offset table, 全局偏移量表)的数据结构
但总有一些包含绝对代码的程序, 考虑到兼容问题, 还需要想办法运行它们. 有没有更好的, 一劳永逸的方案呢?
虚实交错的魔��法
绝对代码经过编译链接之后, 程序看到的内存地址就会确定下来了, 加载运行的时候就会让程序使用这一内存地址, 来保证程序可以正确运行. 一种尝试是把程序看到的内存和它运行时候真正使用的内存解耦开来. 这就是虚拟内存的思想.
有了虚拟内存之后, 进程只需要认为自己运行在虚拟地址上就可以了, 真正运行的时候, 才把虚拟地址映射到物理地址.
我们只要**把程序链接到一个固定的虚拟地址, 加载的时候把它们加载到不同的物理地址, 并维护好虚拟地址到物理地址的映射关系, **
关键:硬件把物理地址映射成虚拟地址,维护地址映射功能。操作系统决定具体要把虚拟地址映射到哪些物理地址。
虚拟内存机制是一个软硬协同才能工作的机制:
-
操作系统加载进程的时候决定要把进程的虚拟地址映射到哪些物理地址;
-
等到进程真正运行之前, 还需要配置MMU, 把之前决定好的映射落实到硬件上,
-
进程运行的时候, MMU就会进行地址转换, 把进程的虚拟地址映射到操作系统希望的物理地址.
(注意到这个映射是进程相关的: 不同的进程有不同的映射,)
分段
MMU地址映射最简单的方法就是, 物理地址=虚拟地址+偏移量。即段式虚拟内存管理机制, 简称分段机制.
把物理内存划分成若干个段, 不同的进程就放到不同的段中运行, 进程不需要关心自己具体在哪一个段里面, 操作系统只要让不同的进程使用不同的偏移,进程之间就不会相互干扰
Minix就是这样工作的, 一些简单的嵌入式系统和实时系统, 也是通过分段机制来进行虚存管理.
但是很复杂+性能不高,实际上现在没什么人用这个了。。。。。
超越容量的界限
这部分我看的有点吃力,参考了一些其他资料:
https://blog.csdn.net/jinking01/article/details/107098437
https://blog.csdn.net/starter____ _/article/details/100998087
https://www.cnblogs.com/wkfvawl/p/11700301.html
为什么 Linux 默认页大小是 4KB
https://draveness.me/whys-the-design-linux-default-page/
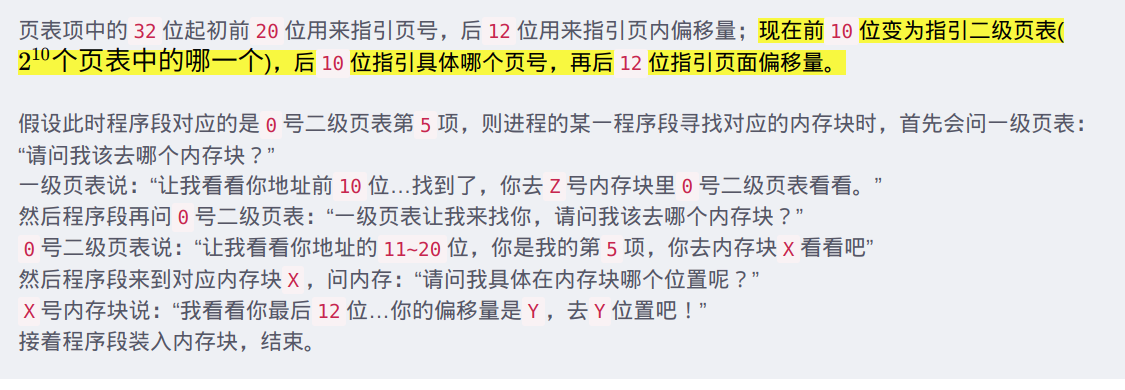
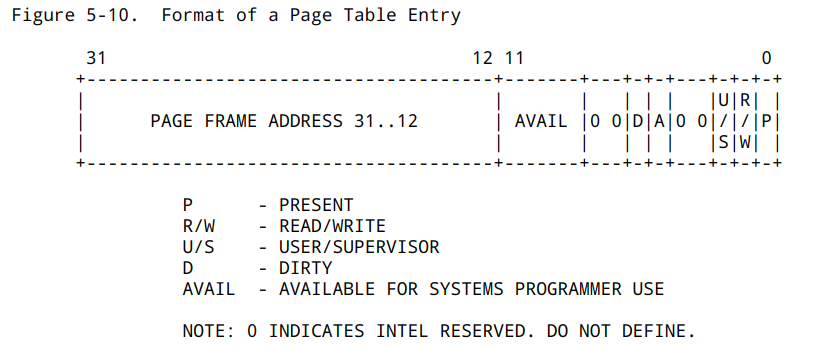
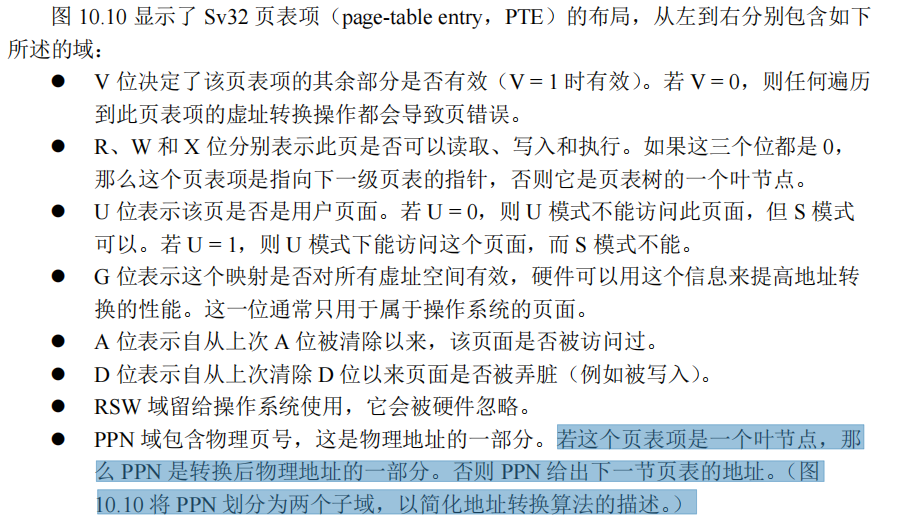
其中页目录项和页表项的结构是
-
present位表示物理页是否可用, 不可用的时候又分两种情况:
-
物理页面由于交换技术被交换到磁盘中了, Page fault
-
图访问一个未映射的线性地址, 并没有实际的物理页与之相对应, 就是一个非法操作
-
-
R/W位表示物理页是否可写
-
U/S位表示访问物理页所需要的权限, 如果一个ring 3的进程尝试访问一个ring 0的页面, 当然也会被判定为非法操作
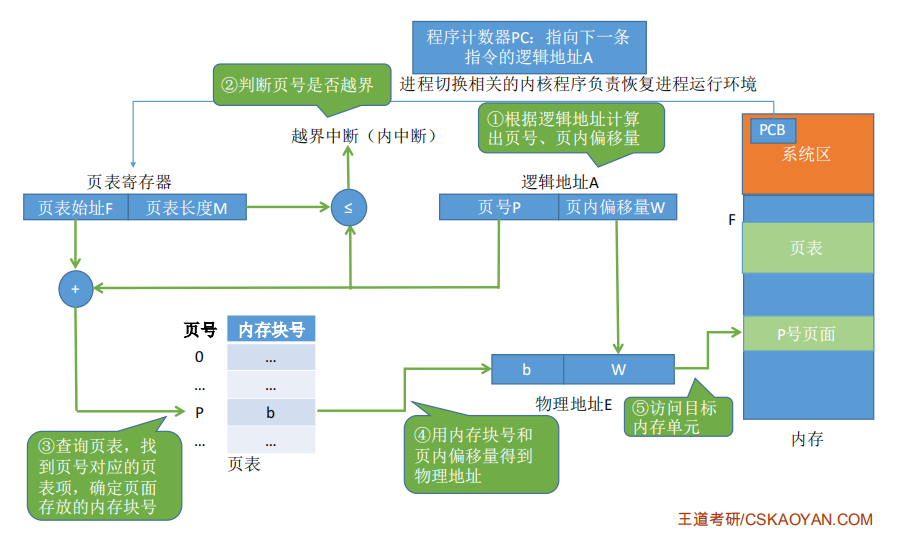
分页
事实上, 我们需要一种按需分配的虚存管理机制. 之所以分段机制不好实现按需分配, 就是因为段的粒度太大了, 为了实现这一目标, 我们需要反其道而行之: 把连续的存储空间分割成小片段, 以这些小片段为单位进行组织, 分配和管理. 这正是分页机制的核心思想
分页机制引入了一个叫"页表"的结构, 页表中的每一个表项记录了一个虚拟页到物理页的映射关系, 来**把不必连续的物理页面重新组织成连续的虚拟地址空间. **
操作系统首先需要以物理页为单位对��内存进行管理. **每当加载程序的时候, 就给程序分配相应的物理页(注意这些物理页之间不必连续), 并为程序准备一个新的页表, 在页表中填写程序用到的虚拟页到这些物理页的映射关系. **
等到程序运行的时候, 操作系统就**把之前为这个程序填写好的页表设置到MMU中, MMU就会根据页表的内容进行地址转换, **把程序的虚拟地址空间映射到操作系统所希望的物理地址空间上.
每一张页目录和页表都有1024个表项, 每个表项的大小都是4字节, (4k)
除了包含页表(或者物理页)的基地址, 还包含一些标志位信息. 要放在寄存器中是不可能的, 因此它们要放在内存中. 为了找到页目录, i386提供了一个CR3(control register 3)寄存器, 专门用于存放页目录的基地址.
这样,** 页级地址转换就从CR3开始一步一步地进行, 最终将虚拟地址转换成真正的物理地址, 这个过程称为一次page table walk.**
总结:操作系统负责写好小纸条和分配关系,MMU负责执行小纸条。
问:虚存管理中PIC的好处
我们之前提到, PIC的其中一个好处是可以将代码加载到任意内存位置执行. 如果配合虚存管理, PIC还有什么新的好处呢? (Hint: 动态库已经在享受这些好处了)
问:理解分页细节
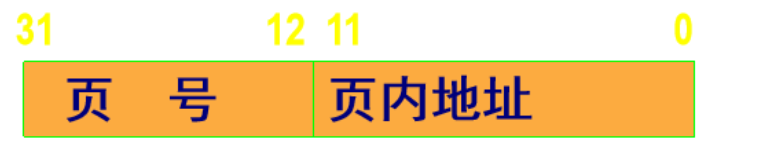
- i386不是一个32位的处理器吗, 为什么表项中的基地址信息只有20位, 而不是32位?
答:页表信息表示本身需要2^12的空间,即4kb
- 手册上提到表项(包括CR3)中的基地址都是物理地址, 物理地址是必须的吗? 能否使用虚拟地址?
整个页表的基址存放在 CR3 寄存器里。CR3 存放的是物理地址,这是整个地址转换最根本的基础。在系统初始化时,CR3 必须填入物理地址,否则没办法进行地址转换了。这个东西是要让 MMU "看"的,它是个硬件,只能看得懂物理地址。
每个页表项(PML4E, PDPTE, PDE,PTE)里的基址,都是物理地址。
但是,整个页转换表结构是存放内存里,属于虚拟地址。也就是:页转换表结构需要进行内存映射。
- 为什么不采用一级页表? 或者说采用一级页表会有什么缺点?
当虚拟空间巨大的时候,页表项增多,页表本身占据的空间也会非常庞大。
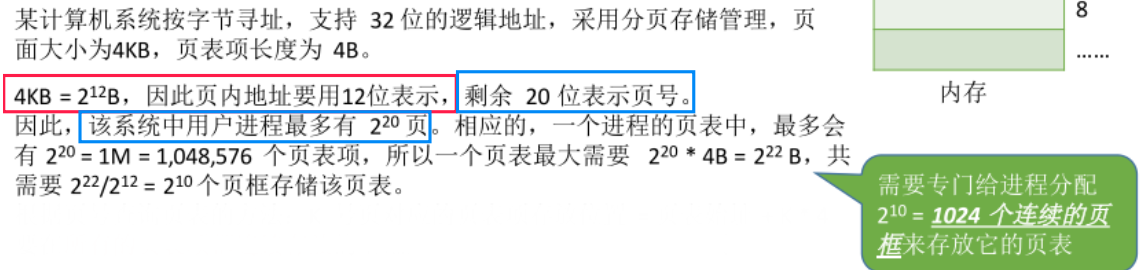
对于32位虚拟地址空间,假设页面大小为4K,页表项大小为4字节:
一个进程有4G/4k = 2^20个页面 因为一个页面需要一个页表项来对应,所以,进程的页表项个数也为2^20个 不难得出该进程的页表占用了 2^20 * 4 / 4096(4k) = 1024个页面的大小
没有必要让整个页表常驻内存,因为进程在一段时间内可能只需要访问某几个特定的页面。
问:空指针真的是"空"的吗?
程序设计课上老师告诉你, 当一个指针变量的值等于NULL时, 代表空, 不指向任何东西. 仔细想想, 真的是这样吗? 当程序对空指针解引用的时候, 计算机内部具体都做了些什么? 你对空指针的本质有什么新的认识?
-
进程试图访问一个未映射的线性地址, 并没有实际的物理页与之相对应,出现错误。
-
或者访问没有权限的地址页,导致直接出错。
-
Linux 中,每个进程空间的 0x0 虚拟地址开始的线性区(memory region)都会被映射到一个用户态没有访问权限的页上。通过这样的映射,内核可以保证没有别的页会映射到这个区域。
-
编译器把空指针当做 0 对待,开心地让你去访问空指针。
-
缺页异常处理程序被调用,因为在 0x0 的页没有在物理内存里面。
-
缺页异常处理程序发现你没有访问的权限。
-
内核发送 SIGSEGV 信号给进程,该信号默认是让进程自杀。
这个文章不错,Linux C程序真的不能访问NULL指针吗:
https://cloud.tencent.com/developer/article/1536302
状态机视角下的虚存管理机制
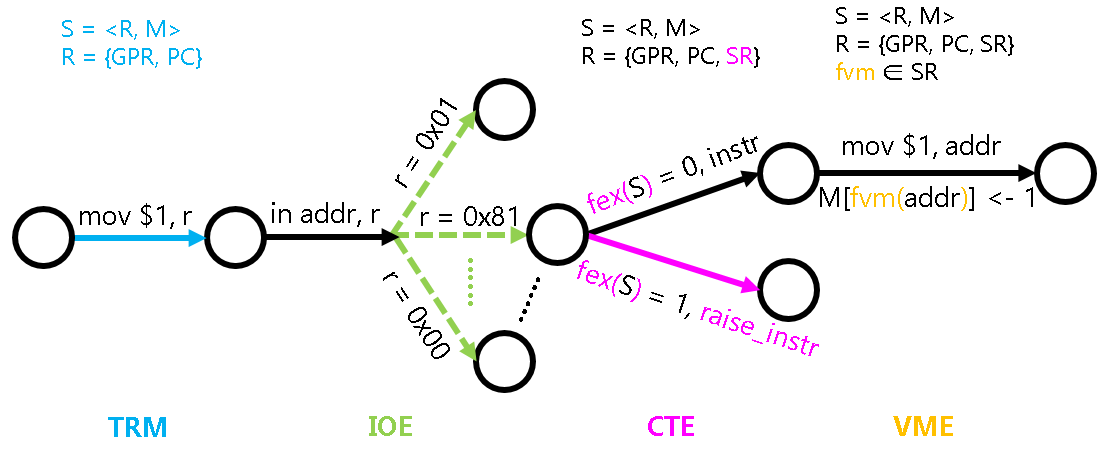
fvm()函数可以认为是系统寄存器SR的一部分, 操作系统通过修改SR来对虚存进行管理
在分页机制上运行Nanos-lite
为了让
map()填写的映射生效, 我们还需要在NEMU中实现分页机制. 具体地, 我们需要实现以下两点:
如何判断CPU当前是否处于分页模式?
分页地址转换�的具体过程应该如何实现?
但这两点都是ISA相关的, 于是NEMU将它们抽象成相应的API:
// 检查当前系统状态下对内存区间为[vaddr, vaddr + len), 类型为type的访问是否需要经过地址转换.
int isa_mmu_check(vaddr_t vaddr, int len, int type);
// 对内存区间为[vaddr, vaddr + len), 类型为type的内存访问进行地址转换
paddr_t isa_mmu_translate(vaddr_t vaddr, int len, int type);
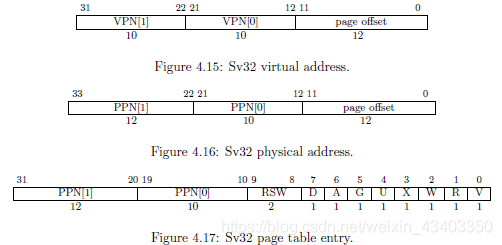
riscv32的Sv32分页机制和x86非常类似, 只不过寄存器的名字和页表项结构有所不同: 在riscv32中, 页目录基地址和分页使能位都是位于satp寄存器中. 至于页表项结构的差异, 这里就不详细说明了, 还是RTFM吧.
你需要理解分页地址转换的过程, 然后实现
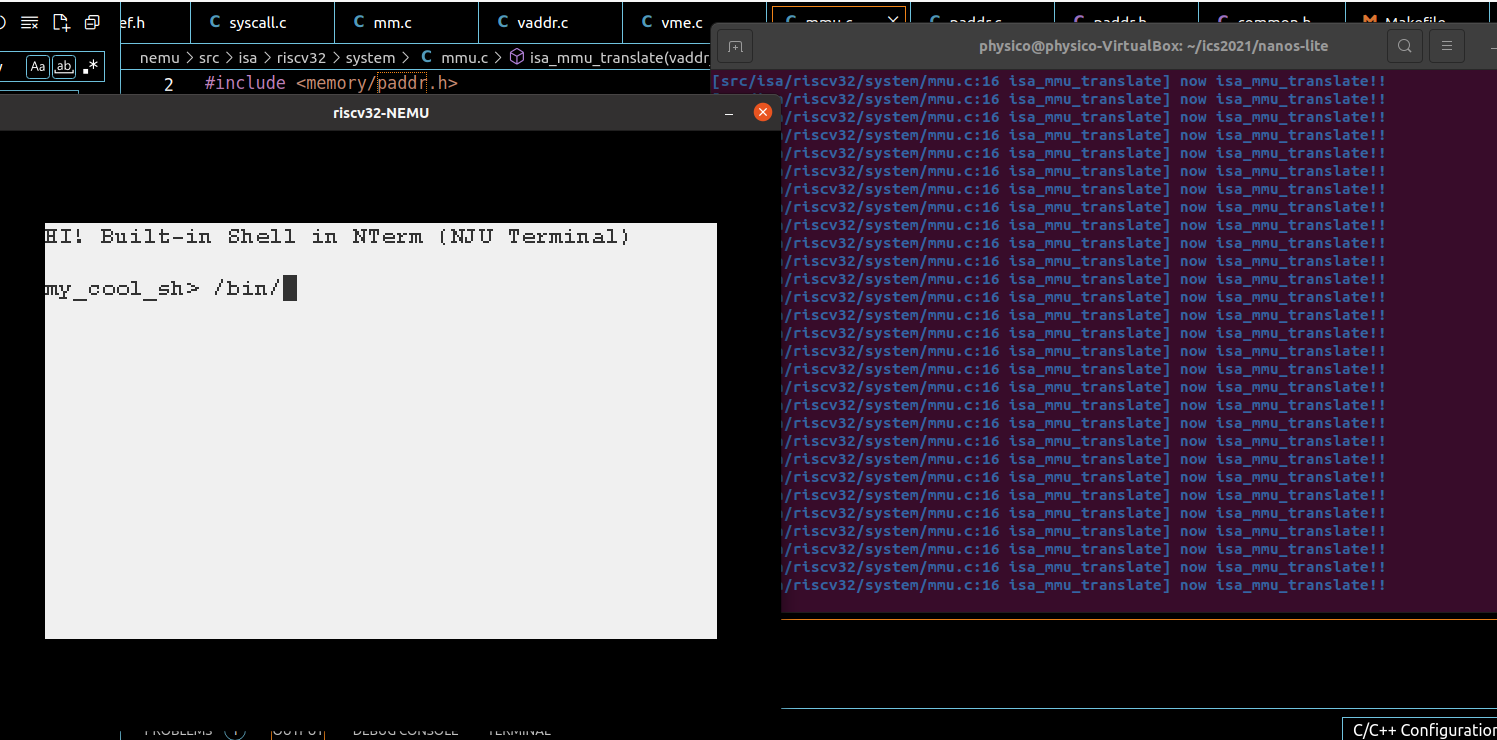
isa_mmu_check()(在nemu/src/isa/$ISA/include/isa-def.h中定义) 和isa_mmu_translate()(在nemu/src/isa/$ISA/system/mmu.c中定义),你可以查阅NEMU的ISA相关API说明文档来了解它们的行为. 另外由于我们不打算实现保护机制, 在
isa_mmu_translate()的实现中,你务必使用assertion检查页目录项和页表项的present/valid位, 如果发现了一个无效的表项, 及时终止NEMU的运行, 否则调试将会非常困难. 这通常是由于你的实现错误引起的, 请检查实现的正确性.
我参考了一些其他的关于页表叙述:
https://xy-plus.gitbook.io/rcore-step-by-step/ye-biao-jian-jie
csr寄存器:

地址和页表项的构成:
此时一种最简单的解决方案是:将全部物理内存区域映射到虚拟地址空间。此时虚拟地址和物理地址之间会有一种简单的对应关系,称为 线性映射 ,具体关系式如下:
virtual address = physical address + offset
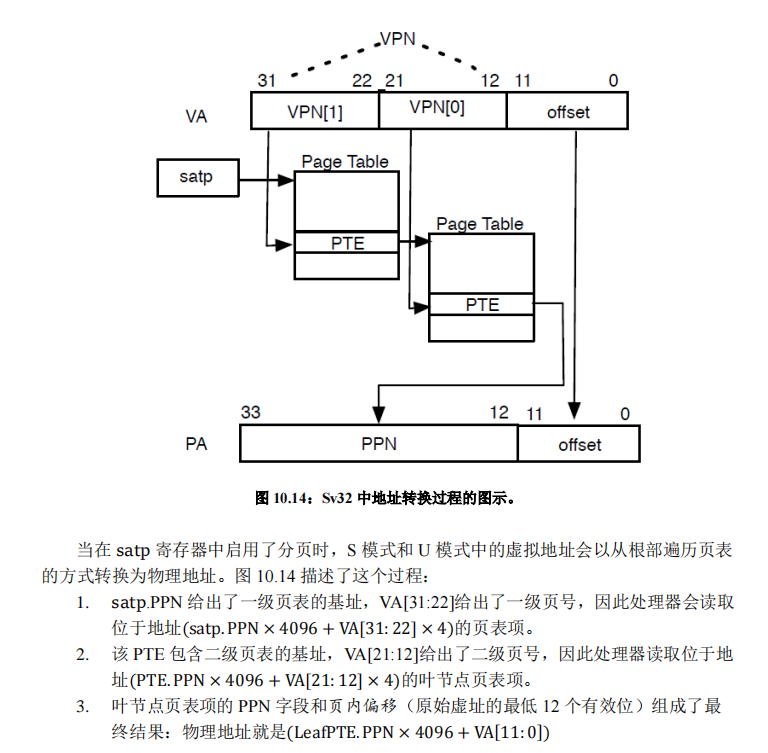
具体的页表转换过程:

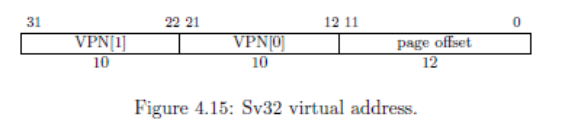
注意到riscv32 中所有页面都是 4k 对齐,因此任何页表基地址的低 12 位一定是 0 。这使得我们在保存页表基址的时候只需要保存其高 22 位(PPN)。
我思考了很久页目录项的每一项怎么实现………然后小伙伴提醒不需要那么复杂,只要最简单的地址索引就好… 顿时泪流满面。
然后我们还要知道一点就是,map只需要实现填写一级和二级页表,然后一级就是用VA,二级是用VA+PA(图上都有,一个是正向思考一个是反向思考!)
如果你感到很困难,把这个过程的每一步写下来(第一步做什么,第二部做什么,都要细化!写得出来才是懂了,没写出来就没真的懂。)
而且还要注意看看map的循环,具体的源码是怎么样走的,要�注意是顺序映射,所以不需要考虑很多花里胡哨的问题。(什么时候才要创造新页表?看循环其实就知道了。)
此时还要注意一个点:
IC6-7NK6{NEV~L4Z1))[EK_MGtEixiOTm-9cd610a69c87088c418e7133ffff08e4.png)
对于不同isa的映射,我们跑的算是客户程序(所有的都是am上的客户程序),然后真正的转换到物理 还要guest到host(这个问题很坑)。其实就是一个问题:
硬件层你怎么解引用??怎么获取软件的信息???要用什么才能读取到软件的信息??怎么read? 这是非常关键且重要的问题,怎么在nemu实现“解引用”
调不出来,想哭,发现是我的页表项加法有点问题(感觉是指针之类的运算问题),然后一个个仔细修改,发现问题出在最后的页表项,一顿尝试后终于调出来了 哭瞎QWQ 太好哭了
实在绷不住了,借用了阿尼亚的mmu进行diff各种神奇的段错误。
还要注意的是,在页表相关计算的时候要记得转换一下指针。。。别用指针做加法运算。。
这东西让我怀疑了自己100次是不是不适合做PA
在分页机制上运行用户进程
目前这个地址空间除了内��核映射之外就没有其它内容了, 具体可以参考
abstract-machine/am/src/$ISA/nemu/vme.c.不过, 此时
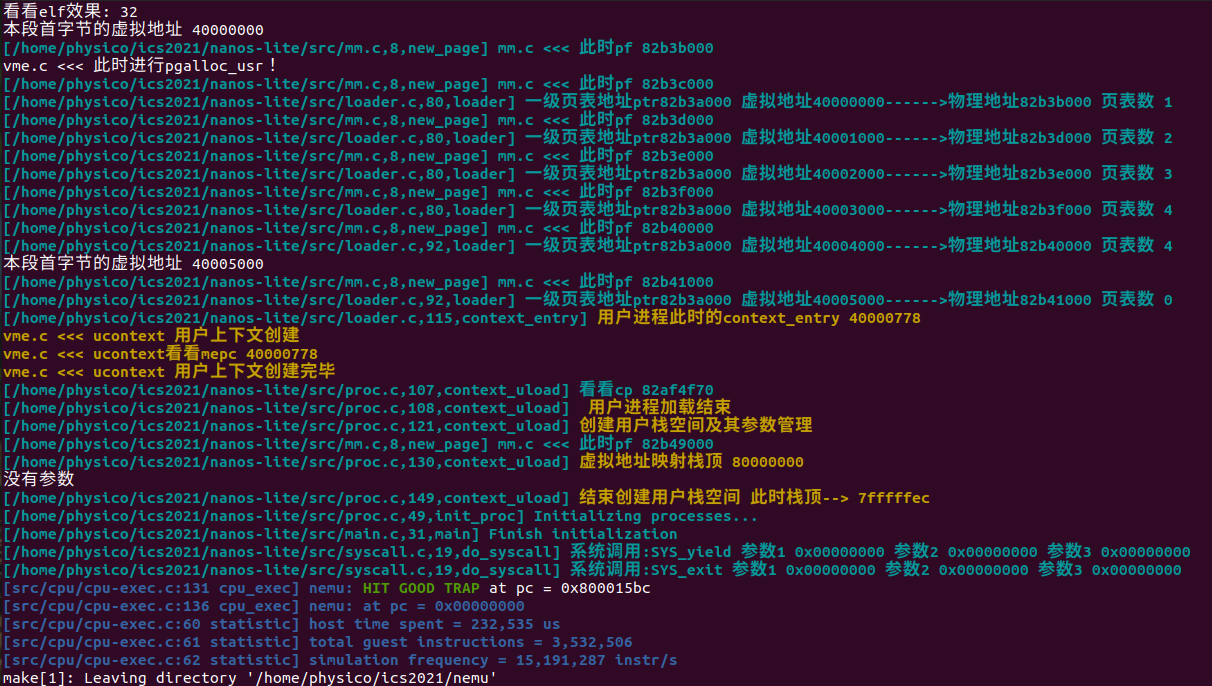
loader()不能直接把用户进程加载到内存位置0x40000000附近了, 因为这个地址并不在内核的虚拟地址空间中, 内核不能直接访问它.loader()要做的事情是, 获取程序的大小之后, 以页为单位进行加载:
申请一页空闲的物理页
通过
map()把这一物理页映射到用户进程的虚拟地址空间中. 由于AM native实现了权限检查, 为了让程序可以在AM native上正确运行, 你调用map()的时候需要将prot设置成可读可写可执行从文件中读入一页的内容到这一物理页中
这一切都是为了让用户进程在将来可以正确地运行:** 用户进程在将来使用虚拟地址访问内存, 在loader为用户进程维护的映射下, 虚拟地址被转换成物理地址, 通过这一物理地址访问到的物理内存, 恰好就是用户进程想要访问的数据.**
另一个需要考虑的问题是用户栈, 和
loader()类似, 我们需要把new_page()申请得到的物理页通过map()映射到用户进程的虚拟地址空间中. 我们把用户栈的虚拟地址安排在用户进程虚拟地址空间的末尾, 你可以通过as.area.end来得到末尾的位置, 然后把用户栈的物理页映射到[as.area.end - 32KB, as.area.end)这段虚拟地址空间.最后, 为了让这一地址空间生效, 我们还需要将它落实到MMU中. 具体地, 我们希望在CTE恢复进程上下文的时候来切换地址空间. 为此, 我们需要将进程的地址空间描述符指针
as->ptr加入到上下文中, 框架代码已经实现了这�一功能(见abstract-machine/am/include/arch/$ISA-nemu.h), 在x86中这一成员为cr3, 而在mips32/riscv32中则为pdir. 你还需要
修改
ucontext()的实现, 在创建的用户进程上下文中设置地址空间描述符指针在
__am_irq_handle()的开头调用__am_get_cur_as()(在abstract-machine/am/src/$ISA/nemu/vme.c中定义), 来将当前的地址空间描述符指针保存到上下文中在
__am_irq_handle()返回前调用__am_switch()(在abstract-machine/am/src/$ISA/nemu/vme.c中定义)来切换地址空间, 将被调度进程的地址空间落实到MMU中
这里遇到的第一个大坑就是怎么优雅的改写loader(差点忘了具体程序头表的成分了,又去看书复习了一遍。。。)
然后又忘了as里面其实是有个ptr的。。。。
写loader实在蚌埠住了(浮躁了),开始抱大腿(卡在具体页读取思路上)
此时我又被vaddr_ifetch没实现卡了一晚上 - -。。。。。(一直到不了mmu,直接说我要访问的地方飘了。。。。)出现了超边界提示。通过排查指令可以知道我们执行前会进行fetch_decode——isa_fetch_decode——instr_fetch——vaddr_ifetch,就发现了问题源。。
然后发现神奇mepc之类都为0的问题。。。。开始怀疑上下文是不是有问题。。。一顿操作猛如虎调了一下用户栈相关,解决
这里要重新实现一下sbrk的映射
(笔者在这一阶段打出了GG)
问:内核映射的作用
对于x86和riscv32, 在
protect()中创建地址空间的时候, 有一处代码用于拷贝内核映射:// map kernel space
memcpy(updir, kas.ptr, PGSIZE);
尝试注释这处代码, 重新编译并运行, 你会看到发生了错误. 请解释为什么会发生这个错误.